Inicio » SegundoParcial-Mate-Mecatronica
Archivos de la categoría: SegundoParcial-Mate-Mecatronica
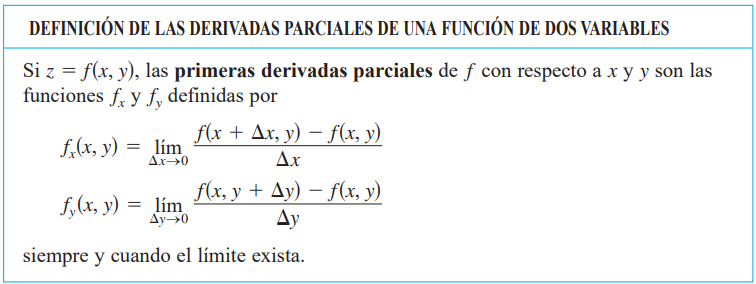
Derivadas parciales
La introducción de las derivadas parciales ocurrió años después del trabajo sobre el cálculo de Newton y Leibniz. Entre 1730 y 1760, Leonhard Euler y Jean Le Rond d’Alembert publicaron por separado varios artículos sobre dinámica en los cuales establecieron gran parte de la teoría de las derivadas parciales. Estos artículos utilizaban funciones de dos o más variables para estudiar problemas de equilibrio, movimiento de fluidos y cuerdas vibrantes.
Por ejemplo, para determinar el efecto de un catalizador en un experimento, un químico podría repetir el experimento varias veces usando cantidades distintas de catalizador, mientras mantiene constantes las otras variables como temperatura y presión. Para determinar la velocidad o la razón de cambio de una función f respecto a una de sus variables independientes se puede utilizar un procedimiento similar. A este proceso se le llama derivación parcial y el resultado se llama derivada parcial de f con respecto a la variable independiente elegida.